Taxonomy of Acquisition Methods
| Axis | Categories |
|---|---|
| Tactile vs. Non-tactile | Tactile (e.g., coordinate measuring machines) vs. non-tactile (optical scanners, sonar) |
| Destructive vs. Non-destructive | Destructive (e.g., slicing in tomography) vs. non-destructive (laser scanning, stereo) |
| Active vs. Passive | Active (projects its own illumination: structured light, ToF) vs. Passive (relies on ambient light: stereo) |
| Optical vs. Non-optical | Optical (laser, stereo cameras) vs. non-optical (ultrasound, radar, MRI) |
| On a rough scale of resolution ↔ measurement range: |
- Interferometry, AFM, TEM - sub-nanometre to nanometre
- Laser line triangulation, structured light - micrometre to millimetre
- Stereo triangulation, stereo vision - micrometre to centimetre
- Time-of-Flight lidar - centimetre to meters
- Radar - centimetres to kilometres
Stereo Vision (Passive, Optical)
Basics of Disparity and Parallax
Stereoscopic vision and depth perception is based on:
- Disparity: the difference in position of an object seen by two (or more) images.
- Parallax: Change of position of an object, as seen from different perspectives,
- different image coordinates from identical world coordinates of an object,
- different camera coordinates from identical world coordinates of an object.
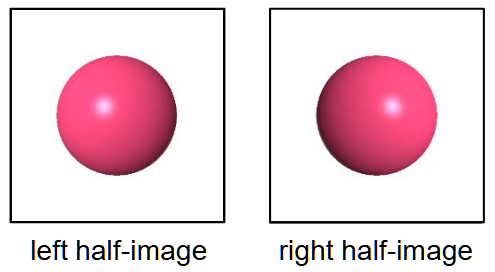
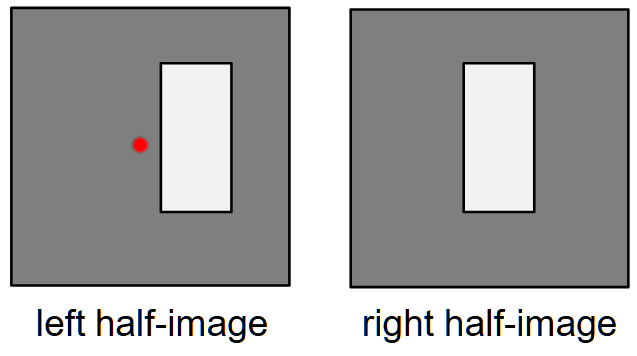
Both images together form the so-called stereogram, the individual images are so-called half-images.
Disparity
Differences in two (or more) images of the same object.
- Point disparity - Horizontal and vertical disparity
- Horizontal disparity: Difference in horizontal position of the same point in two images. (e.g., left and right eye)
- Vertical disparity: Difference in vertical position of the same point in two images. (e.g. when the viewing directions are not perfectly co-planer)
- Orientation disparity respectively general form and size differences between both images.
- Leads always to point disparities.
- Gray value disparity and shading disparity caused by different Normals of object points in diffuse reflection in the images.
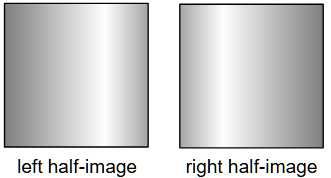
- Photometric disparity caused by surface reflectivity, aka specular reflection
- Monocular occlusion at object edges (Difficult for steroe algorithms)
Remark: The camera calibration must be very accurate, because small errors in the calibration lead to large errors in the reconstruction.
Parallax
Parallax refers to how an object’s apparent position shifts when viewed from two locations; in the “normal case” only the horizontal component matters.
Depth Reconstruction Equations
For a scene point with image coordinates in the left camera and in the right, the depth is
and the horizontal/vertical coordinates follow
Larger disparity (closer object).
Error Propagation
Depth accuracy degrades with distance and depends on two ratios
Roughly, errors grow quadratically with distance.
Laser Scanning (Active Optical)
Laser-based scanners elevate resolution and range by actively projecting light and measuring its return. There are two main principles:
- Time-of-Flight (ToF)
- Emit a short laser pulse at time , detect its return at .
- Distance , where is the speed of light.
- Simple concept, but needs very fast timing electronics; typical accuracy: centimetres.
- Optical triangulation (Structured Light / Laser Triangulation)
- A laser line or pattern is projected from a known position ; a camera at sees the distorted pattern on the object.
- By measuring angles of projection vs. observation, depth is recovered via simple trigonometry:
where $b = |O_1O_2|$ is the fixed baseline.
- Offers micrometre–millimetre accuracy over moderate ranges, but requires very precise calibration of both camera and projector.
Calibration and Sensor Localization
All active and passive methods rely on knowing the intrinsic (focal length, principal point, distortion) and extrinsic (rotation , translation ) parameters of the sensor(s). Calibration typically uses a calibration object with known 3D “ground truth” points whose image coordinates are measured, yielding a linear or non-linear system to solve for the parameters
Exam Questions to Prepare
-
- Classify different 3D acquisition methods by tactile/non-tactile, active/passive, optical/non-optical.
- Define disparity and parallax, and explain why vertical disparity vanishes in the normal stereo case.
- Derive the normal-case stereo reconstruction equations and discuss error propagation ().
- Explain the principle of ToF and derive .
- Explain optical triangulation (structured light) geometrically, including its trigonometric depth formula.
- Describe the two-stage pipeline: sensor localization and 3-D data localization relative to the sensor.